opencv源代码中包含了dft的demo,但没有使用cuda的demo。下文会简单给出一个cuda例程,并进行简单的高频滤波。
为方便说明,将程序分成了若干部分
1.头文件
#include <iostream>
#include <opencv2/core.hpp>
#include <opencv2/imgcodecs.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/core/cuda.hpp>
#include <opencv2/cudaarithm.hpp>
using namespace cv;2.导入图片加载到GPU,为简单使用了单色图
int main()
{
Mat img = cv::imread("pic2.png",ImreadModes::IMREAD_GRAYSCALE);
cuda::GpuMat *in_mat = new cuda::GpuMat();
in_mat->upload(img);3.扩展图片到合适大小 并进行 傅立叶正变换,参考了opencv源码中的代码
cuda::GpuMat padded; //expand input image to optimal size
int m = getOptimalDFTSize(in_mat->rows);
int n = getOptimalDFTSize(in_mat->cols); // on the border add zero values
cuda::copyMakeBorder(*in_mat, padded, 0, m - in_mat->rows, 0, n - in_mat->cols, BORDER_CONSTANT, Scalar::all(0));
cuda::GpuMat padfloat;
padded.convertTo(padfloat, CV_32F);
cuda::GpuMat zeromat(padded.size(), CV_32F);
zeromat.setTo(Scalar(0));
cuda::GpuMat planes[] = { padfloat, zeromat };
cv::cuda::GpuMat complexI;
cuda::merge(planes, 2, complexI);
cuda::dft(complexI, complexI, complexI.size()); // this way the result may fit in the source matrix . complexI 为变换后的实部与虚部4.高频滤波
opencv源码中的demo交换了频谱的四个象限,我这里就不进行交换了,所以需要保留的低频区域在四个角上,而不是在图像的中心
const int mask_w = 150; //设置保留图像四个角的椭圆区域大小
const int mask_h = 100; //
Mat mask(padded.rows, padded.cols, CV_8UC1, Scalar(255)); //画图只能在cpu上做,故建了一个Mat
cv::ellipse(mask, RotatedRect(Point2f(0, 0), Size2f(mask_w, mask_h), 0), Scalar(0), -1);
cv::ellipse(mask, RotatedRect(Point2f(0, mask.rows), Size2f(mask_w, mask_h), 0), Scalar(0), -1);
cv::ellipse(mask, RotatedRect(Point2f(mask.cols, 0), Size2f(mask_w, mask_h), 0), Scalar(0), -1);
cv::ellipse(mask, RotatedRect(Point2f(mask.cols, mask.rows), Size2f(mask_w, mask_h), 0), Scalar(0), -1);
cuda::GpuMat gpumask(mask);
complexI.setTo(Scalar(0, 0), gpumask);//将高频区域设置为05.可视化频谱图 (看看而已,非必须)
cuda::split(complexI, planes); // planes[0] = Re(DFT(I), planes[1] = Im(DFT(I))
cuda::magnitude(planes[0], planes[1], planes[0]);// planes[0] = magnitude
cuda::GpuMat g_magI = planes[0];
Mat magI;
g_magI.download(magI);
magI += Scalar::all(1); // switch to logarithmic scale
log(magI, magI);
// crop the spectrum, if it has an odd number of rows or columns
magI = magI(Rect(0, 0, magI.cols & -2, magI.rows & -2));
normalize(magI, magI, 0, 255, NORM_MINMAX); // Transform the matrix with float values into a
imwrite("magi.png", magI);6.反傅立叶变换
cuda::GpuMat inverseTransform;
cuda::dft(complexI, complexI, complexI.size(), cv::DFT_INVERSE);
cuda::split(complexI, planes);
planes[0].rowRange(0, in_mat->rows).colRange(0, in_mat->cols).copyTo(inverseTransform);7.归一化,并保存滤波后的图片
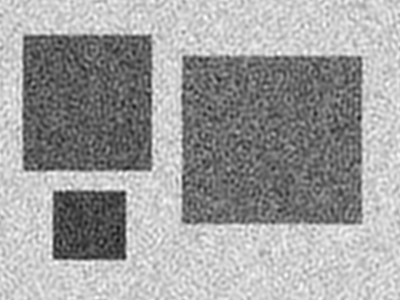
double minval, maxval;
cuda::minMax(*in_mat, &minval, &maxval);
cuda::normalize(inverseTransform, inverseTransform, maxval, minval, cv::NORM_MINMAX, CV_8UC1);
//cuda::normalize(inverseTransform, inverseTransform, 255, 0, cv::NORM_MINMAX, CV_8UC1);
//网上很多代码使用的是上面一段,归一化到0-255,但这样有时会大幅改变图片的整体亮度,故我这里使用了原图的最大,最小值进行归一化
//或者采用cv::DFT_SCALE标志,会实现自动归一化到原来的尺度而不需要单独进行归一化
//cuda::dft(complexI, complexI, complexI.size(), cv::DFT_INVERSE + cv::DFT_SCALE);
Mat inverseTransform_save;
inverseTransform.download(inverseTransform_save);
imwrite("inverse.png", inverseTransform_save);
}