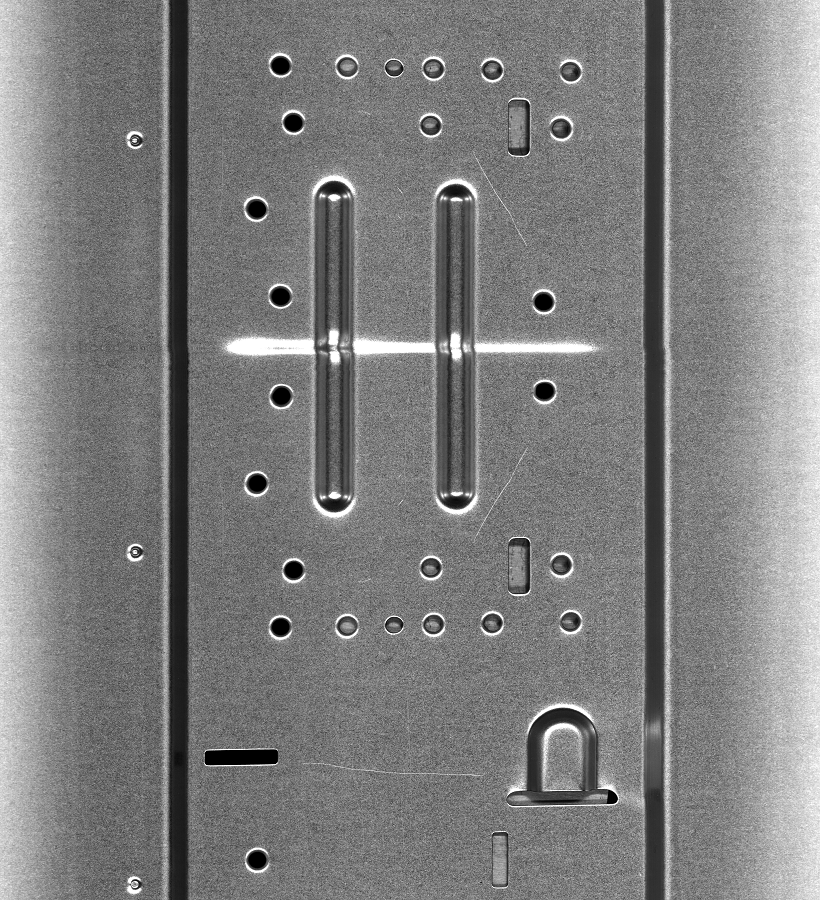
opencv中有现成的边缘检测和线检测算法,也有对应的gpu实现。但没有曲线检测的算法。下面就实现一个基于Gabor滤波的曲线检测算法,并使用gpu来提高运算速度。算法参考了GitHub上的代码,通过控制Gabor滤波的参数来控制检测的线宽等特征,并使用了FFT来代替卷积从而提升速度。
1.算法来源
算法参考了https://github.com/Po-Ting-lin/HairRemoval里面的代码。
2.算法流程
- 根据预输入的参数,生成Gabor滤波矩阵。不同方向生成的矩阵不一样,最多8个方向。
- 将各个Gabor滤波矩阵与原图片进行卷积。为了加快运行速度,使用了fft来加速卷积的运算速度
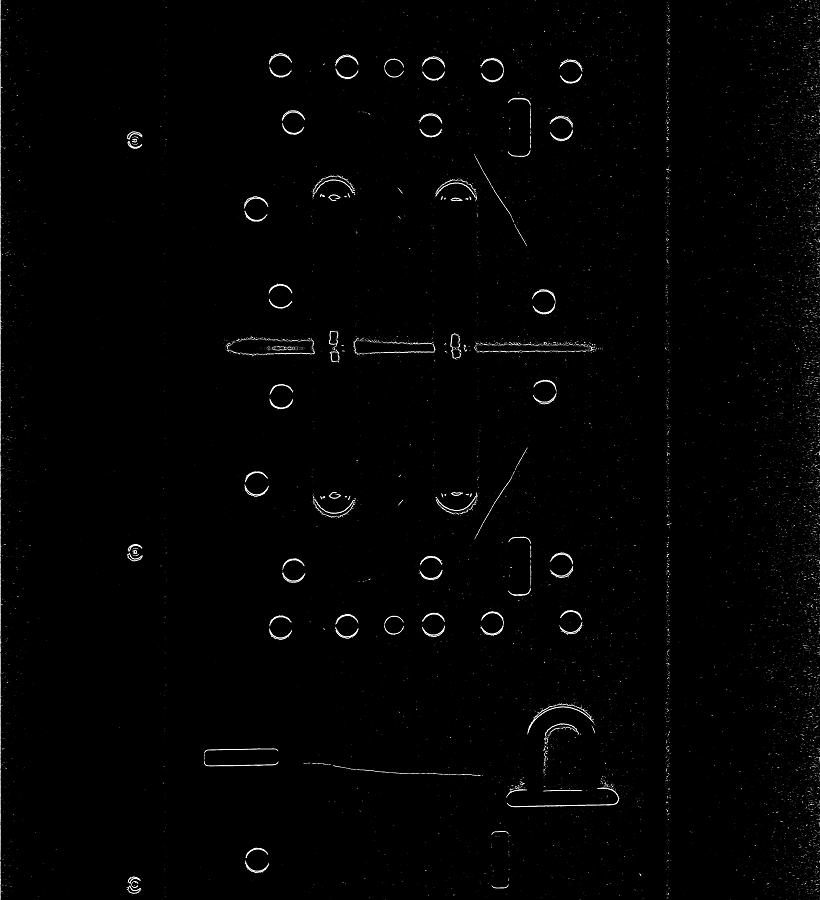
- 取卷积后的图片各方向的最大值组成最后的结果输出
- 根据实际进行2值化等处理,输出检测出的曲线
3.代码
头文件 DetectLineCUDA.h 的主要部分。关键是构造函数,输入了Gabor滤波的参数,可以用来调整检测曲线的宽带,长度等。
class DetectLineCUDA
{
public:
DetectLineCUDA(int cols, int rows, std::vector<int> _angles,int MinArea = 20,float Alpha = 1.15f,float Beta = 0.55f,float HairWidth = 12.0f);
void detect(cv::cuda::GpuMat& src, cv::cuda::GpuMat& mask);
~DetectLineCUDA();
private:
.............
};
#endif // DETECTLINECUDA_H
- 构造函数初始化了一些变量
- detect函数是算法运行的主函数,通过_initGaborFilterCube函数生成滤波矩阵,随后通过一个循环进行快速傅里叶,计算各个方向上的卷积。最后通过_cubeReduction函数合并结果
DetectLineCUDA::DetectLineCUDA(int cols, int rows, std::vector<int> _angles, int MinArea, float Alpha, float Beta, float HairWidth)
{
Width = cols;
Height = rows;
NumberOfFilter = 8;
this->MinArea = MinArea;
this->Alpha = Alpha;
this->Beta = Beta;
this->HairWidth = HairWidth;
SigmaX = 8.0f * (sqrt(2.0 * log(2) / CV_PI)) * HairWidth / Alpha / Beta / CV_PI;
SigmaY = 0.8f * SigmaX;
KernelRadius = ceil(3.0f * SigmaX); // sigmaX > sigamY
KernelW = 2 * KernelRadius + 1;
KernelH = 2 * KernelRadius + 1;
KernelX = KernelRadius;
KernelY = KernelRadius;
FFTH = snapTransformSize(Height + KernelH - 1);
FFTW = snapTransformSize(Width + KernelW - 1);
cufftPlan2d(&_fftPlanFwd, FFTH, FFTW, CUFFT_R2C);
cufftPlan2d(&_fftPlanInv, FFTH, FFTW, CUFFT_C2R);
this->angles.insert(this->angles.end(), _angles.begin(), _angles.end());
}
int DetectLineCUDA::snapTransformSize(int dataSize) {
........
}
........
void DetectLineCUDA::detect(cv::cuda::GpuMat& src, cv::cuda::GpuMat& mask) {
float* d_PaddedData;
float* d_Kernel;
float* d_PaddedKernel;
float* d_DepthResult;
........
//// init data
float* h_kernels = _initGaborFilterCube();
cudaMemcpy(d_Kernel, h_kernels, KernelH * KernelW * NumberOfFilter * sizeof(float), cudaMemcpyHostToDevice);
cuda::GpuMat src_f;
if (src.channels() == 3) {
cuda::GpuMat src_gray;
src.convertTo(src_gray, CV_32FC3);
cuda::cvtColor(src_gray, src_f,cv::COLOR_BGR2GRAY);
}
else {
src.convertTo(src_f, CV_32F);
}
cuda::GpuMat d_src_c_ptr_mat(src.rows, src.cols, CV_32FC1, d_src_c_ptr);
cuda::GpuMat pand_mat(FFTH, FFTW, CV_32FC1, d_PaddedData);
cuda::copyMakeBorder(src_f, d_src_c_ptr_mat, 0, FFTH - src.rows, 0, FFTW - src.cols, BORDER_WRAP);
d_src_c_ptr_mat.copyTo(pand_mat);
// FFT data
cufftExecR2C(_fftPlanFwd, (cufftReal*)d_PaddedData, d_DataSpectrum);
cudaDeviceSynchronize();
for (int i = 0; i < angles.size(); i++) {
int kernel_offset = angles[i] * KernelH * KernelW;
int data_offset = i * FFTH * FFTW;
_padKernel(d_PaddedKernel, d_Kernel + kernel_offset);
cv::cuda::GpuMat raw_dst_mat(FFTH, FFTW, CV_32FC1, d_PaddedKernel);
cv::Mat cpumat;
raw_dst_mat.download(cpumat);
// FFT kernel
cufftExecR2C(_fftPlanFwd, (cufftReal*)d_PaddedKernel, (cufftComplex*)d_KernelSpectrum);
cudaDeviceSynchronize();
//// mul
_modulateAndNormalize(d_TempSpectrum, d_DataSpectrum, d_KernelSpectrum, 1);
cufftExecC2R(_fftPlanInv, (cufftComplex*)d_TempSpectrum, (cufftReal*)(&d_DepthResult[data_offset]));
cudaDeviceSynchronize();
cv::cuda::GpuMat d_DepthResult_mat(FFTH, FFTW, CV_32FC1, d_DepthResult + data_offset);
d_DepthResult_mat.download(cpumat);
}
_cubeReduction(d_DepthResult, d_Result);
cuda::GpuMat d_Result_mat(Height , Width,CV_8UC1, d_Result);
d_Result_mat.copyTo(mask);
.........
}
float* DetectLineCUDA::_initGaborFilterCube() {
float* output = new float[KernelW * KernelH * NumberOfFilter];
float* output_ptr = output;
for (int curNum = 0; curNum < NumberOfFilter; curNum++) {
float theta = (float)CV_PI / NumberOfFilter * curNum;
for (int y = -KernelRadius; y < KernelRadius + 1; y++) {
for (int x = -KernelRadius; x < KernelRadius + 1; x++, output_ptr++) {
float xx = x;
float yy = y;
float xp = xx * cos(theta) + yy * sin(theta);
float yp = yy * cos(theta) - xx * sin(theta);
*output_ptr = exp((float)(-CV_PI) * (xp * xp / SigmaX / SigmaX + yp * yp / SigmaY / SigmaY)) * cos((float)CV_2PI * Beta / HairWidth * xp + (float)CV_PI);
}
}
}
return output;
}cuda 文件 DetectLinekernel.cu
里面的一些函数可以使用opencv里的函数代替,但感觉意义不大,就直接使用原来的了。
函数调用的方法
Mat inputmat = imread("test.bmp",cv::IMREAD_GRAYSCALE);
cv::bitwise_not(inputmat,inputmat);//算法找寻的是黑色的曲线,所以将原始图片取反
cuda::GpuMat inputgpu;
inputgpu.upload(inputmat);
std::vector<int> angles;
angles.push_back(ANGLE_0);
angles.push_back(ANGLE_23);
angles.push_back(ANGLE_45);
angles.push_back(ANGLE_68);
angles.push_back(ANGLE_90);
angles.push_back(ANGLE_113);
angles.push_back(ANGLE_135);
angles.push_back(ANGLE_157);
DetectLineCUDA dl(inputmat.cols, inputmat.rows,angles,20,1.95f,0.85f,8.0f);
cv::cuda::GpuMat m_g = cuda::createContinuous(inputmat.size(), CV_8UC1);
dl.detect(inputgpu, m_g);
Mat m;
m_g.download(m);
imwrite("m.bmp", m);// m 就是分析出的曲线,后续可以再进行2值化,去掉一些干扰算法效果